Recently drones have emerged as a great new tool that many companies and even personal entities have decided to exploit. Looking at the potential these new drones have it would be in everyone’s best interest to use these drones or Unmanned Air Vehicles to their fullest potential. One way to help achieve that is by mounting cameras onto these drones and using the data captured by the video feed received from these cameras. This project is using machine learning and computer vision to help make use of the data captured by these drones. A RetinaNet model is used to train various models on images captured from the Stanford campus. The model is detecting various classes of urban artifacts such as pedestrians and cyclists.
Kailany, A., & Daneshyari, M. (2022). Object Detection in Unmanned Aerial Vehicle Imagery. International Journal of Emerging Trends in Science and Technology, 1–9. Retrieved from http://ijetst.in/index.php/ijetst/article/view/1565
M. S. Y. Hii, P. Courtney, and P. G. Royall, “An Evaluation of the Delivery of Medicines Using Drones,” Drones, vol. 3, no. 3, Art. No. 3, Sep. 2019, doi: 10.3390/drones3030052.
C. Xiang, H. Shi, N. Li, M. Ding, and H. Zhou, “Pedestrian Detection Under Unmanned Aerial Vehicle an Improved Single-Stage Detector Based on RetinaNet,” in 2019 12th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Oct. 2019, pp. 1–6. doi: 10.1109/CISP-BMEI48845.2019.8965666.
X. Wang, P. Cheng, X. Liu, and B. Uzochukwu, “Fast and Accurate, Convolutional Neural Network Based Approach for Object Detection from UAV,” in IECON 2018 - 44th Annual Conference of the IEEE Industrial Electronics Society, Oct. 2018, pp. 3171–3175. doi: 10.1109/IECON.2018.8592805.
T.-Y. Lin, P. Goyal, R. Girshick, K. He, and P. Dollár, “Focal Loss for Dense Object De- tection,” ArXiv170802002 Cs, Feb. 2018, Accessed: Apr. 30, 2022. [Online]. Available: http://arxiv.org/abs/1708.02002
“Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks | IEEE Journals Magazine | IEEE Xplore.” https://ieeexplore.ieee.org/document/7485869 (accessed Apr. 30, 2022
“Multi Object Tracking with UAVs using Deep SORT and YOLOv3 Retina Net Detection Frame- work | Proceedings of the 1st ACM Workshop on Autonomous and Intelligent Mobile Systems.” https://dl.acm.org/doi/abs/10.1145/3377283.3377284 (accessed Apr. 30, 2022).
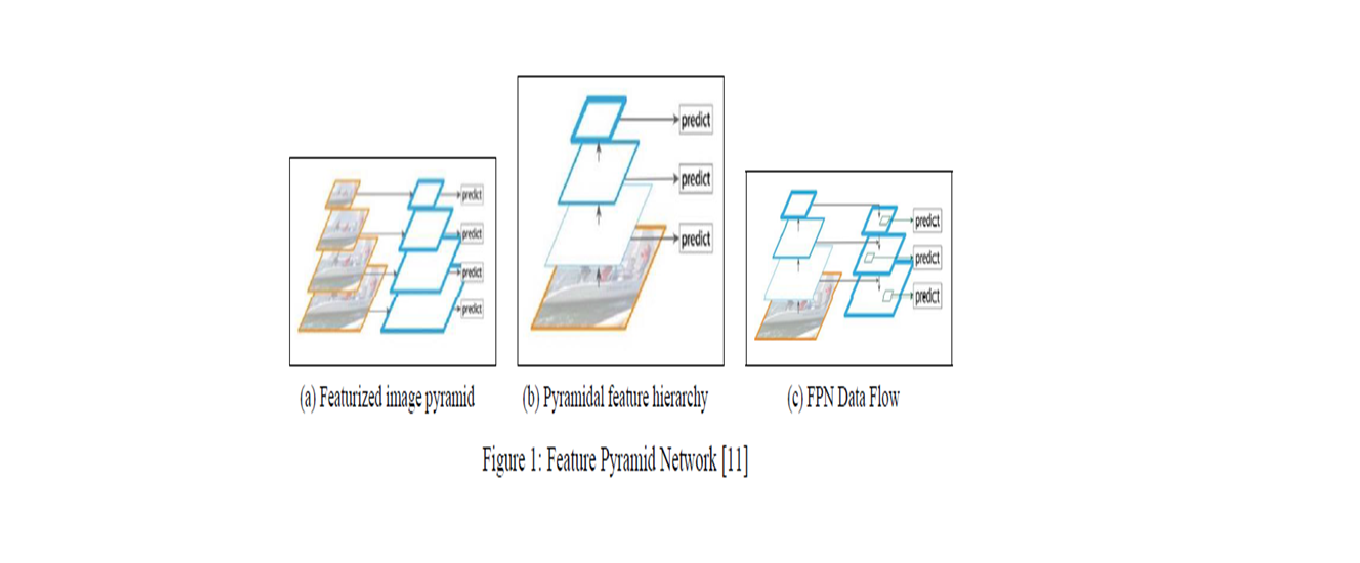
T.-Y. Lin, P. Dollár, R. Girshick, K. He, B. Hariharan, and S. Belongie, “Feature Pyramid Networks for Object Detection,” ArXiv161203144 Cs, Apr. 2017, Accessed: Apr. 30, 2022. [Online]. Available: http://arxiv.org/abs/1612.03144